|
I am a third year PhD student at McGill University and a visiting researcher at Computer Science Department, Princeton University, co-advised by Yi Shao and Szymon Rusinkiewicz. My research aims to build real-world robotic systems capable of generalized manipulation, especially for assembly tasks in construction industry, using end-to-end learning that leverages data from both real-world and simulation. I have experience and a strong passion for robot learning (IL/RL), planning, robot hardware design and setup, object detection and segmentation, and image-based 3D reconstruction. If you have any interesting questions or topics you'd like to discuss, feel free to reach out! Email / X(Twitter) / Linkedin |
|

|
|
|
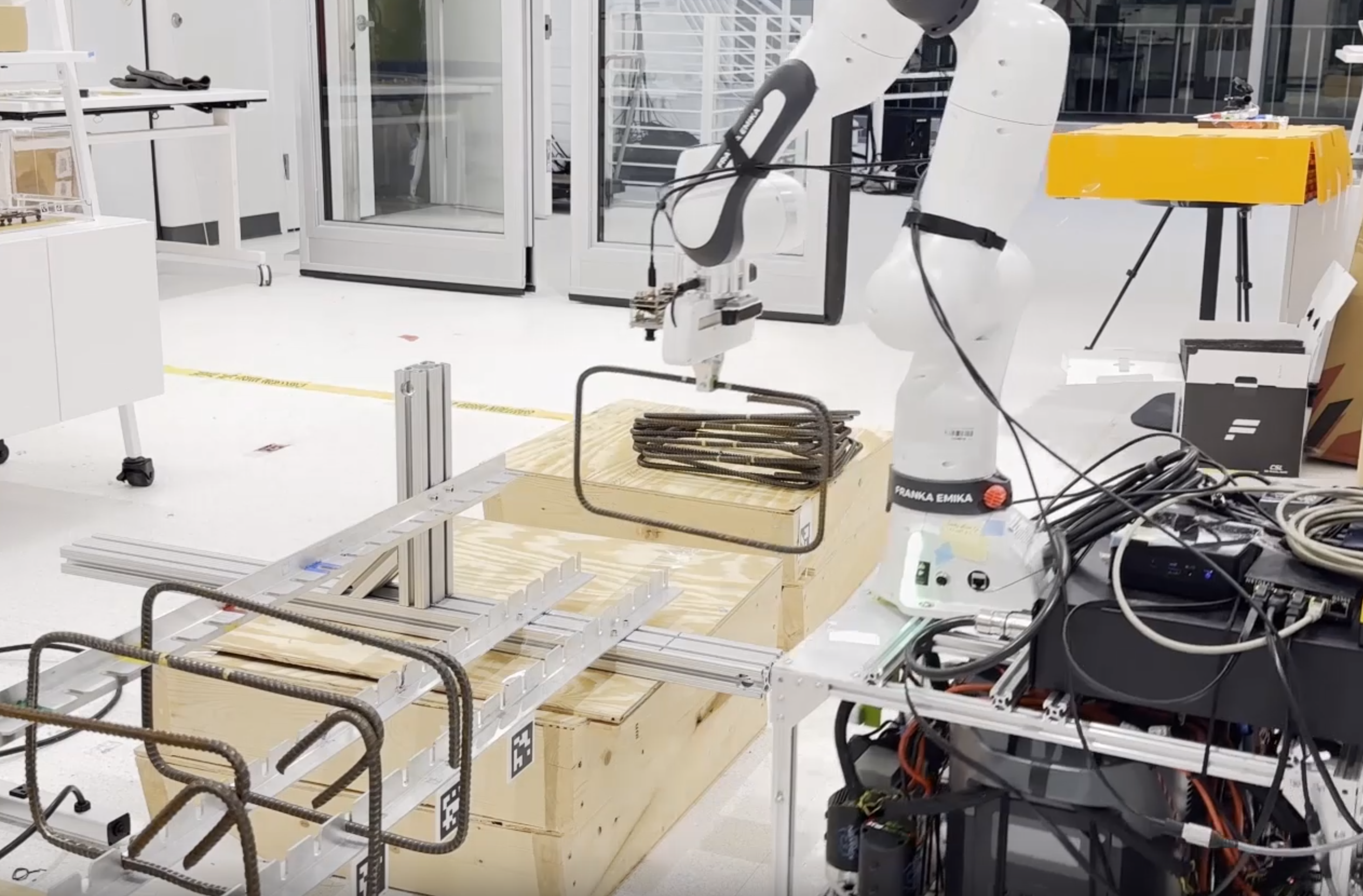
Mobile Robotic Rebar Cage Assembly
Tao Sun, Beining Han, Jimmy Wu, Szymon Rusinkiewicz, Yi Shao Automation in Construction, 2026 Project page / Journal Paper |

|
WoMAP: World Models For Embodied Open-Vocabulary Object Localization
Tenny Yin*, Zhiting Mei, Tao Sun, Lihan Zha, Emily Zhou, Jeremy Bao, Miyu Yamane, Ola Shorinwa* Anirudha Majumdar Conference on Robot Learning (CoRL), 2025 Best Paper Award, RSS 2025 SWoMo and SemRob workshops Project page / ArXiv |

|
Infinigen-Sim: Procedural Generation of Articulated Simulation Assets
Abhishek Joshi, Beining Han, Jack Nugent, Yiming Zuo, Jonathan Liu, Hongyu Wen, Stamatis Alexandropoulos, Tao Sun, Alexander Raistrick, Gaowen Liu, Yi Shao, Jia Deng Under review, 2025 Project page / ArXiv |
|
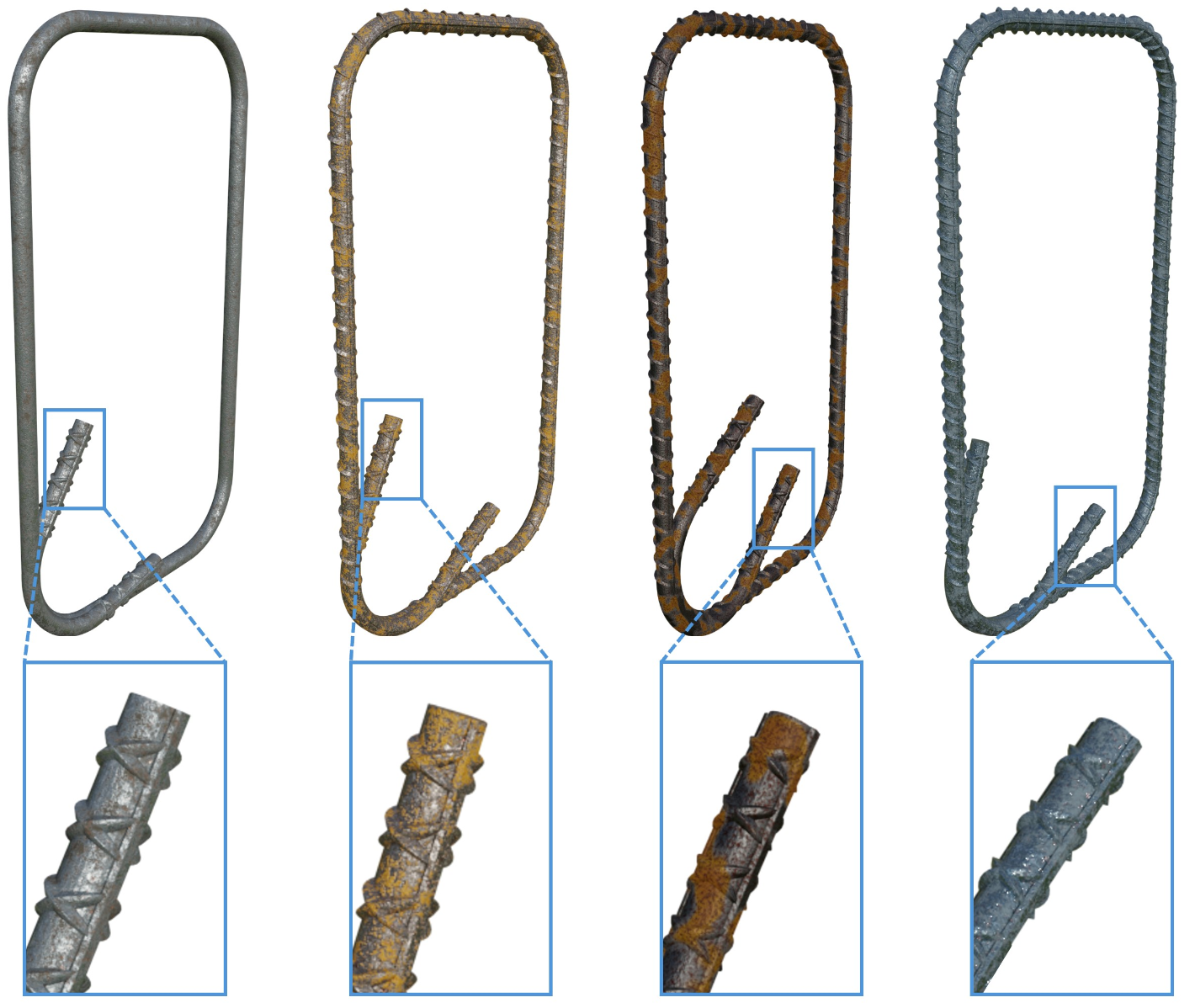
Rebar Grasp Detection using a Synthetic Model Generator and Domain Randomization
Tao Sun, Beining Han, Szymon Rusinkiewicz, Yi Shao Automation in Construction, 2025 Journal paper |
|
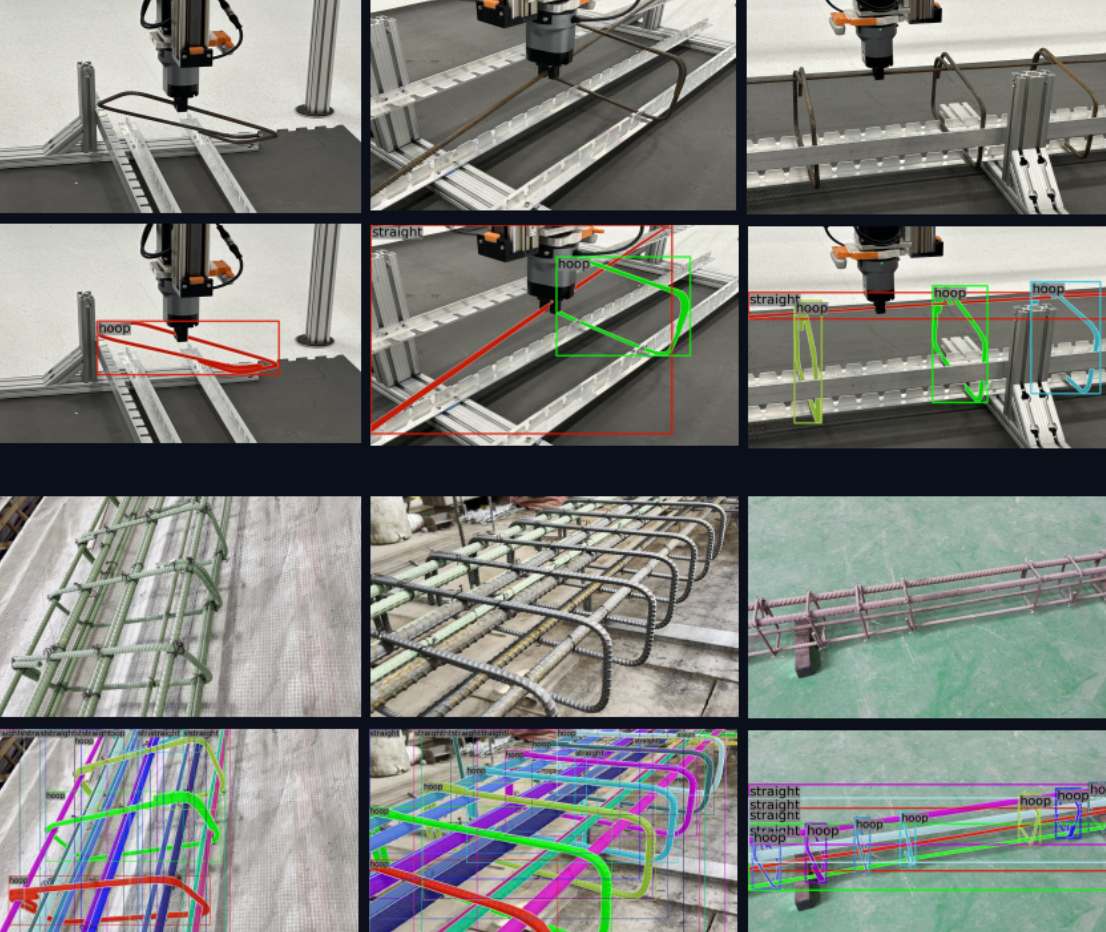
Deep Learning-based Rebar Detection and Instance Segmentation in Images
Tao Sun, Qipei Fan, Yi Shao Advanced Engineering Informatics, 2025 Journal paper |
|
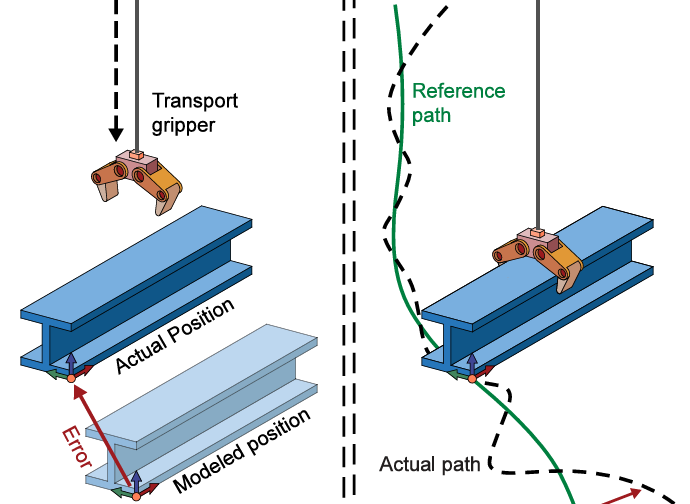
Robotic Motion Planning for Autonomous In-Situ Construction of Building Structures
Cong Zhao, Jianye Chen, Tao Sun, Wei Fan, Xiaoyan Sun, Yi Shao, Quanqin Guo, Hailong Wang Automation in Construction, 2025 Journal paper |
|
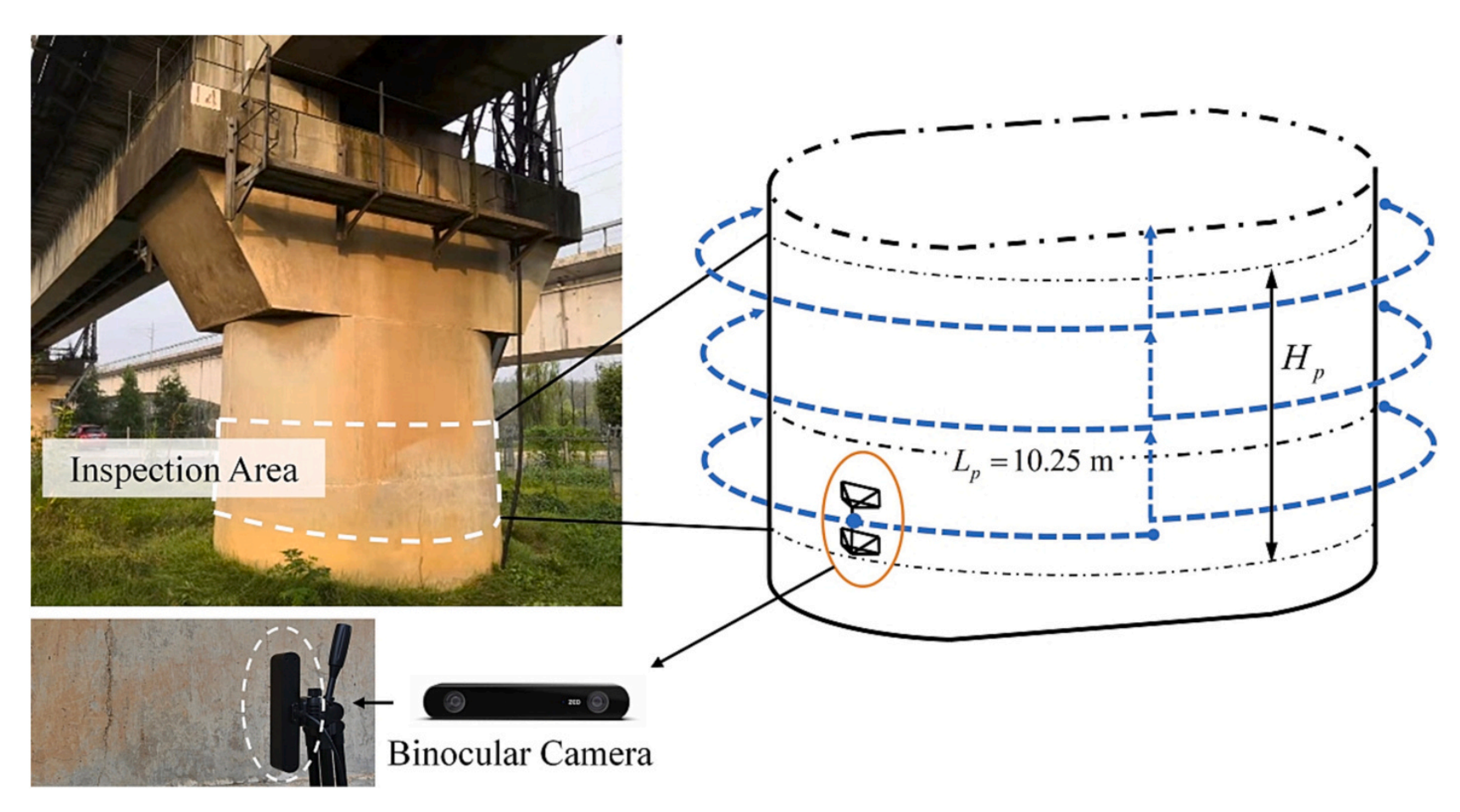
Binocular Video-based 3D Reconstruction and Length Quantification of Cracks in Concrete Structures
Lu Deng, Tao Sun, Liang Yang, Ran Cao Automation in Construction, 2023 Journal paper |
|
|
|
Webpage design courtesy of Jon Barron website. |